はじめに
前回は、ICT活用工事における精度管理の概要と地上型レーザースキャナーの精度確認試験についてお伝えしました。今回はICT施工で使用する建設機械の精度確認試験についてお話したいと思います。
 【ICT活用工事での精度確認①】地上型レーザースキャナーの精度確認試験とは
【ICT活用工事での精度確認①】地上型レーザースキャナーの精度確認試験とは
対象工種とICT建機
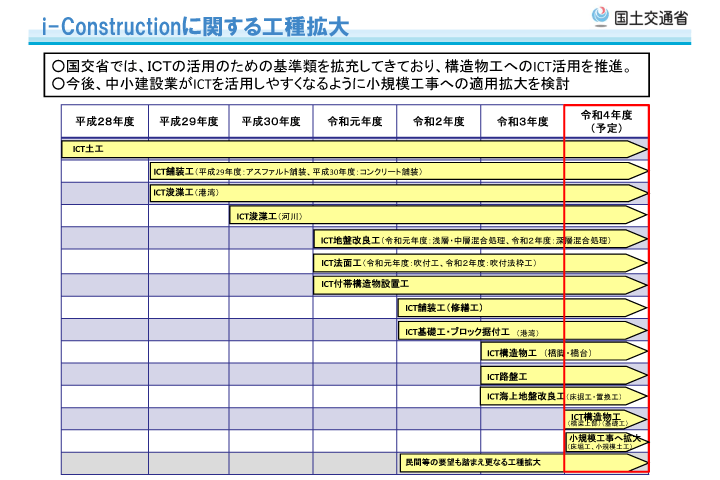
ICT施工が始まった2016年当初の対象工種は土工のみでした。
土工で使用されるICT建機はバックホウやブルドーザー、各種ローラーなどですが、その後対象工種は年々拡大され、使用するICT建機についても対象機種が拡大されています。
例えば、ICT舗装工のモーターグレーダーがそれにあたります。
以下の点を特徴とする建設機械を「ICT建機」と言います。
- 自動追尾TSやGNSSといった測位システムを搭載している
- マシンコントロールまたはマシンガイダンス機能を有している
このような機能により、あらかじめ設定した図面の設計ラインと現況との差分を確認しながら施工を行うことができます。
ICT建機に関する詳しい内容は別のコラムで解説していますのでご参考ください。
 【ICT施工実務シリーズ⑤】ICT建機選定のポイント
【ICT施工実務シリーズ⑤】ICT建機選定のポイントICT建機の精度確認試験とは
国土交通省の要領・基準類を見ると、ICT建機を使用して施工を行う場合には、各工種や建機に応じた精度確認試験を行うよう規定されていることがわかります。
その方法や基準は様々ですが、それらすべてに共通しているのは、ICT建機により計測された3次元座標とTS等により計測された座標の差分(較差)が要求精度内かどうかを確認するのが目的であるという点です。

また、2022年度より土工の出来形管理基準に「施工履歴データを用いた出来形管理要領」が追加されました。
これは、ICT建機による施工履歴データをそのまま出来形管理に使用するというものです。
ICT建機の施工軌跡から記録された3次元座標データを使用するため、施工開始前に厳密な精度確認を行う必要があります。施工段階で得られたデータを出来形管理に利用することで、これまでの出来形管理作業の大幅な効率化と省力化が期待されます。
ICT建機の精度確認試験の流れ
では、ICT土工におけるICTバックホウやICTブルドーザーの精度確認試験の流れをお伝えします。
事前準備
・測位システムの設定
自動追尾式のTSもしくはGNSSを使用し、ICT建機の測位が可能な状態にしておく。
※GNSSの場合は固定局の設置やVRS契約などを準備。
・ローカライゼーション
精度確認試験前にはローカライゼーションを完了し、現地座標を変換したパラメータデータを準備。
※精度確認試験はローカライゼーション範囲内の実施が好ましい。
・3次元設計データ
出来形管理用もしくは施工用の3次元設計データが用意できない場合には、精度確認試験用のものを準備。
・精度確認試験を実施する場所、試験用の施工面
ICT建機を配置し精度確認試験が実施できる場所や試験用の施工面を確保できる場所。
ICT建機の測位
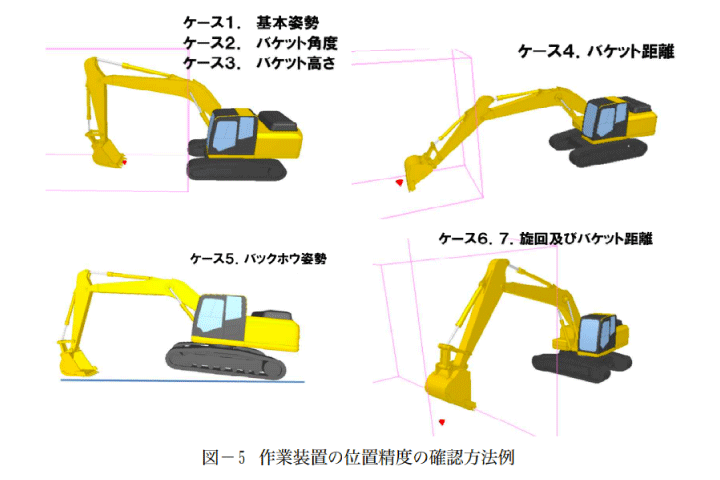
・作業装置の位置とTS計測による較差を確認
実際にバックホウやブルドーザーの姿勢を変えながら作業装置の位置を測定し、TS等により取得される位置との較差を確認。
・テスト作業による検測
対象となるICT建機を使用してテスト作業を行い、施工履歴データの計測精度を確認。
測位方法は、上記の内いずれかでよいとされています。
まとめ
これまでICT建機の精度確認はレンタル会社や施工会社に任せっきりだったが、作業工程を把握するために自分自身でやり方を習得したいという現場監督様に、わたしたちが現場で実技指導をさせていただくことがあります。
ご自身で作業されることで、cm単位の建機の精度誤差を実感でき、MC・MG機能の理解が深まるといったメリットがあります。
よく「丁張りレス」施工という言葉を耳にするかと思いますが、ICT建機の機能や精度確認結果を把握していないと、そう簡単に丁張り無しにはできないのではないでしょうか。
丁張りレスにするための留意点を理解し、ICT建機による施工の正しい知識を得て初めて自信を持って取り組めるのだと思います。
皆さんがICT施工に対する理解を深め、日頃の業務に活かせる情報を発信できるよう、次回も引き続きICT活用工事での精度確認についてお伝えしていきます。